Muscle Modeling: Identify Primary Movers from Movement Results
The ability to produce human movement is reliant on our muscle system applying force to our skeletal system. With information based on muscle architecture, kinematic/kinetics sequencing, and neurological principles DARI can reverse engineer the process and identify primary muscles that would have been activated to produce your body’s movement.
Models Needed:
-Kinematic tracking model for joint centers
-Kinetic tracking model for ground reaction force magnitudes
-Anthropometric model for mass distribution
-Inverse dynamics model or joint torque predictions
-Muscle architecture model for muscle force ranges
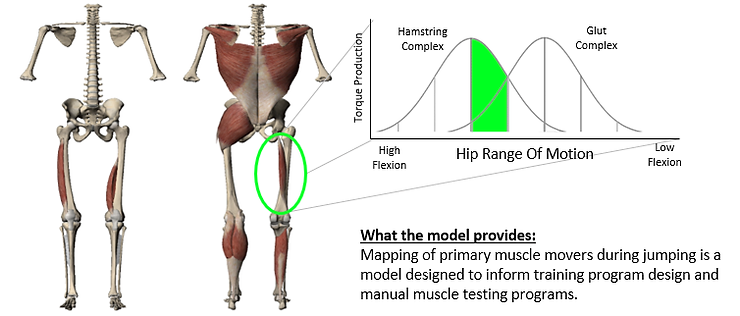
With the above inputs you can collect enough information to accurately determine specific events for muscle modeling. The goal of the predictive primary muscle model is to identify which muscle would have most likely be primarily activated to produce the movement.
To do this, the model needs to identify max joint torque events that are produced for a specific movement (example – vertical jump). At those time events the model will need to look at the joint’s primary plane of movement angulation (in the lower body we will assume the flexion plane). By identifying the angulation when the max joint torque was applied, we can cross reference the muscle architecture model for optimal cross bridging.
This reference will help us identify the most likely activated muscle at that time. This does not determine that other surrounding muscles were not activated at that moment in time. It simply identifies what should have most likely have been the primary mover.
Recent Posts

Insights In Motion – Interview Series
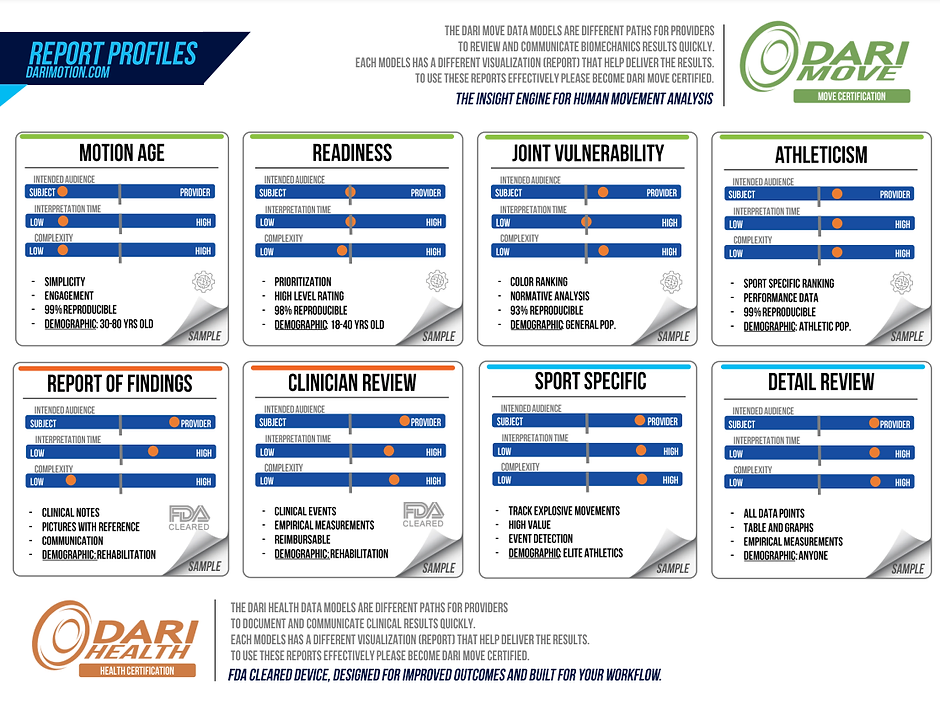
Report Profiles
